
تفاوت موتورهای براشلس
تفاوت موتورهای براشلس
در این قسمت آموزشهای تکمیلی موتور براشلس رو آوردیم.

موتورهای براشلس رو به دو شکل دسته بندی می کنند:
1-Inrunner و Outrunner
2- سنسوردار و بدون سنسور(Sensor VS Sensorless)
نکته طلایی: در تمامی موتورهای براشلس آهنربای دائمی در حال چرخش است.
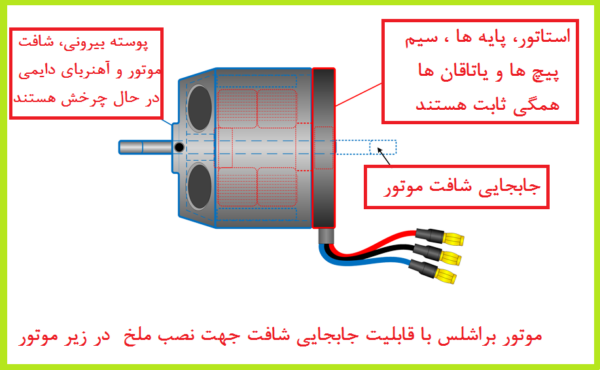
چیزی که واضحه اینه که در تمام موتورهای براشلس چون جاروبک حذف شده پس قطعا سیم پیچ ثابت است و آهنربای دائمی همیشه نقش روتور را دارد. حال در موتورهای Inrunner که قسمت داخلی آن دوار است آهنربای دائمی در درون موتور میچرخد و استاتور در قسمت بیرونی ثابت است و در موتورهای Outrunnerقسمت بیرونی موتور دوران می کند پس آهنربای دائمی در پوسته موتور در حال حرکت است و سیم پیچ در داخل موتور ثابت است.

ولی در موتورهای Inrunner آهنربای دایمی در مرکز موتور به همراه شافت موتور در حال گردش است و سیم پیچ در قسمت بیرونی ثابت است و نقش استاتور دارد.

تعدادی از موتورهای براشلس قابلیت حرکت شافت و انتقال آن به پشت موتور را دارند تا در صورتی که بخواهید ملخ را در جهت عکس نصب کنید امکان پذیر باشد.

تفاوت های موتورهای براشلس Inrunner و Outrunner:
1-ارتفاع و ابعاد موتورهای Inrunner از Outrunner بیشتر است. در شکل زیر مشاهده می کنید.
2-دور موتور(rpm) موتورهای Inrunner بیشتر و گشتاور آن کمتر ازOutrunner است.
3-Kv موتورهای Inrunner بیشتر از Outrunner است.
4-موتورهای Inrunner نیاز به گیربکس جهت کنترل مناسب دور دارند.
5-موتورهای Outrunner سروصدای کمتری نسبت به Inrunner دارند.
6-موتورهای Inrunner نیاز به ملخ های پهن تری نسبت به Outrunner دارند.

لازم به ذکر است که تقریبا در تمامی موارد از Outrunner استفاده می کنیم چون هم نیازی به گیربکس ندارد و هم سروصدای کمتری دارد، وزن آن هم به نسبت کمتر است، بازده بالاتری دارد. شکل زیر یک موتور براشلس اینرانِر به همراه گیربکس را نشان می دهد.

موتورهای براشلس رو اصطلاحا موتورهای سه فاز هم می نامند. دو تا سیم که برای جریان استفاده میشه و یکی هم برای فیدبک به کار برده می شود.
موتور براشلس سنسوردار
در موتورهای سنسور دار از نوعی سنسور هال با خروجی آنالوگ یا دیجیتال جهت تعیین دقیق موقعیت شفت استفاده می شود. این سنسورها را به شکل مختلفی می توان یافت که در شکل های زیر مشاهده می کنید.

هچنین در شکل زیر سنسورهای لحیم شده روی برد را مشاهده می کنید.

بعد از دریافت اطلاعات موقعیت موتور این سنسورها اطلاعات را به دیکدر ارسال می کنند تا به میکروکنترلر ارسال گردد.

شاید این سوال تو ذهنتون باشه که دیگه نیازی به موتورهای سنسوردار نیست وقتی موتورهای بدون سنسور کار میکنن؟؟
دلیل استفاده از سنسور کارکرد نرم تر در هنگام اوج گرفتن رباته. در هنگام شروع سنسورها با تشخیص دقیق محل روتور شروع بسیار خوبی رو دارن. همچنین اگر ملخ به جایی گیرکنه یا اتفاقی برای ربات بیفته سنسورها متوجه میشن و از خرابی موتور جلوگیری میکنن و موتور رو متوقف میکنن.
و اما در موتورهای سنسوردار و بدون سنسور به دلیل کار راحتر با موتورهای بدون سنسور و ارزان تر بودن از آنها استفاده می کنیم.
سیم پیچ های داخلی موتورهای براشلس هم معمولا بصورت ستاره ای می بندن چون هم آسونتره و هم سیم پیچی کمتر نسبت به اتصال دلتا دارد. هرچند دور موتور در اتصال ستاره کمتر از مثلثی است.
تعیین جهت چرخش موتور براشلس
برای برعکس چرخیدن یک موتور براشلس کافیه فقط جای دوتا سیم متصل به موتور را عوض کنید. فرض کنید سه تا سیم پیچ ها را به ترتیب با 1 و 2 و3 نامگذاری کرده اید حال چرخش این سه تا سیم پیچ به صورت زیر است.
123123123123123
الان برقدار شدن سیم پیچ ها رو مشاهده می کنید که به ترتیب انجام میشه حالا فرض کنید که جای 2 و 3 عوض کردید و اتفاقی که میفته بصورت زیر است:
132132132132132
میبینید که باعوض کردن جای 2 و 3 عبارت 123 به عبارت 321 تبدیل می شود که کامل برعکس است و موتور هم برعکس می چرخد.
(منابع : robouav.ir – google.com )
تفاوت موتورهای براشلس

اولین دیدگاه را ثبت کنید